")




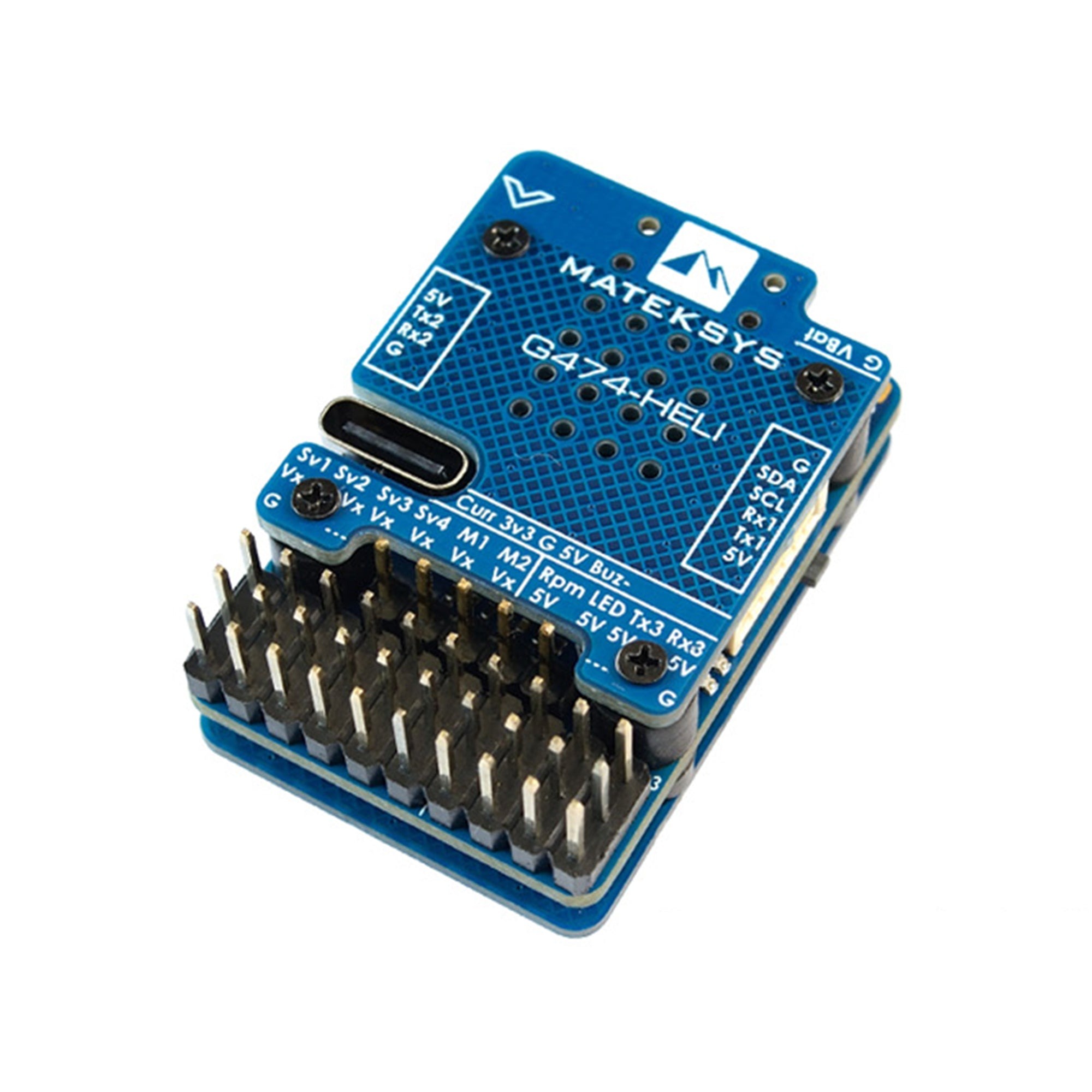
Mateksys RC Helicopter Flybarless Controller G474-HELI
Matek have released a high quality Helicopter Flybarless Controller at a great price! Experience RotorFlight today!
$94.99
Hurry! Only 2 left in stock
Description
What is RotorFlight?
RotorFlight is a cutting-edge open-source flight control software project, designed specifically for helicopters. This project focuses on providing advanced flight control solutions, with an emphasis on performance, reliability, and adaptability. RotorFlight’s software is developed with the community in mind, encouraging contributions and modifications to suit a wide array of helicopter configurations and applications, from hobbyist projects to more sophisticated commercial drones. Based on Betaflight, it has a similar look and feel, easy to use, and has V2 coming soon. https://github.com/rotorflight
Features of RotorFlight
- Optimized flight control algorithms for superior stability and responsiveness.
- Supports a wide range of hardware platforms for enhanced compatibility.
- Advanced tuning capabilities for customized flight characteristics.
- Robust safety features including rescue fail-safe options and real-time diagnostics.
- Open-source framework encouraging community innovation and collaboration.
- V2 coming soon!
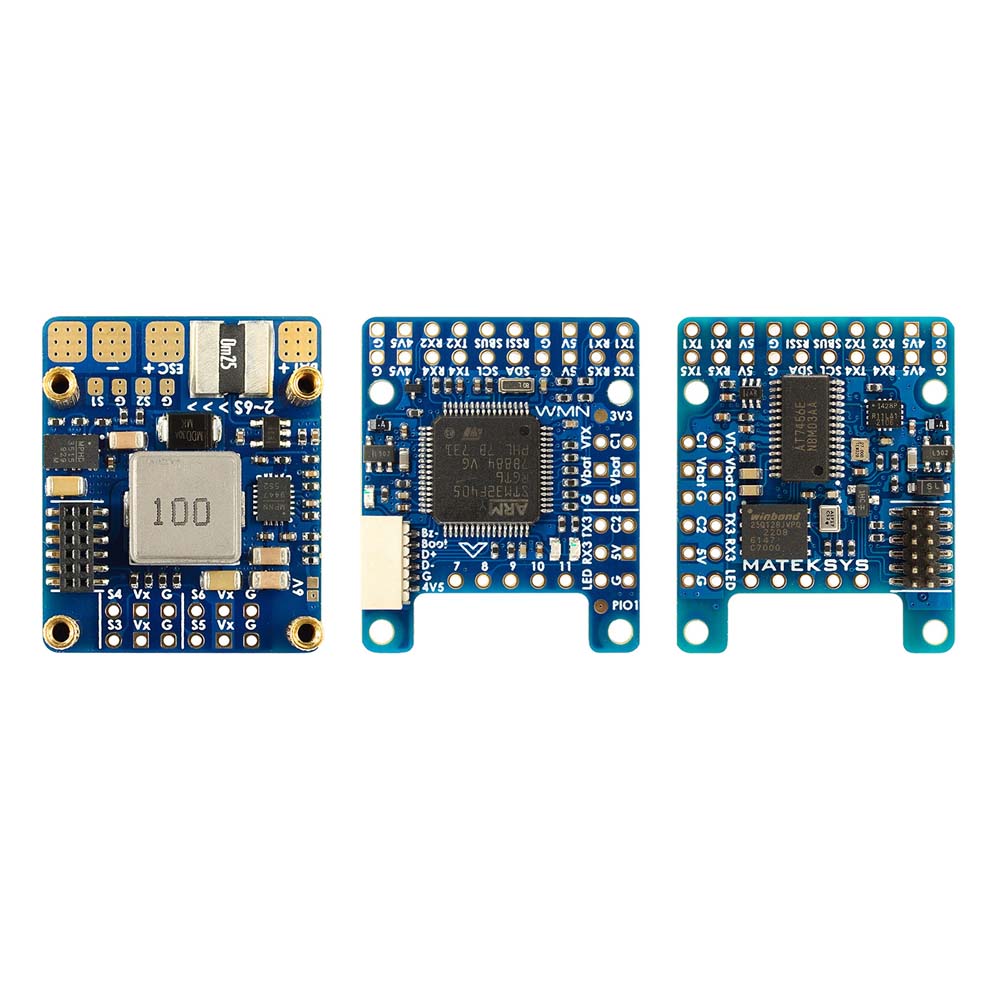
Specifications
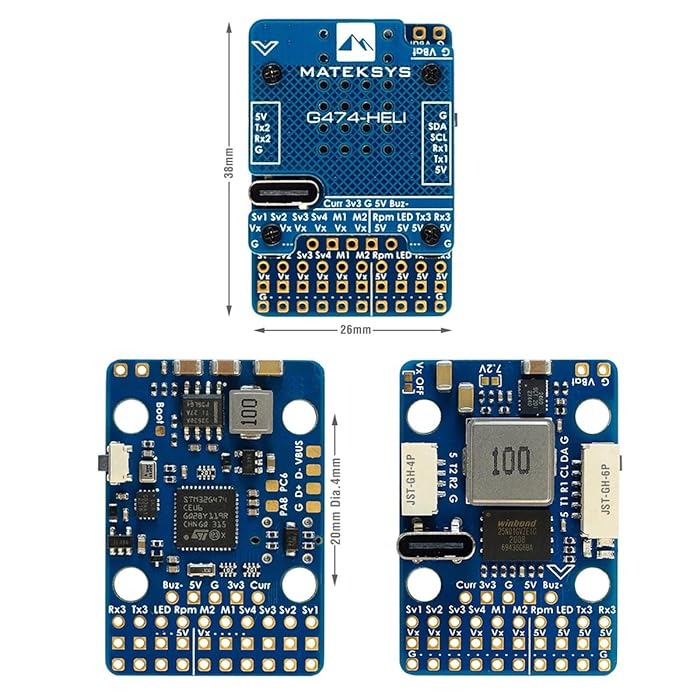
- MCU: STM32G474CE, 170MHz Cortex-M4 , 512KB Flash
- IMU: ICM42688-P
- Baro: SPL06
- Blackbox: 128MB Flash (1G-bit NAND)
- 3x UARTs (1, 2, 3)
- 1x I2C
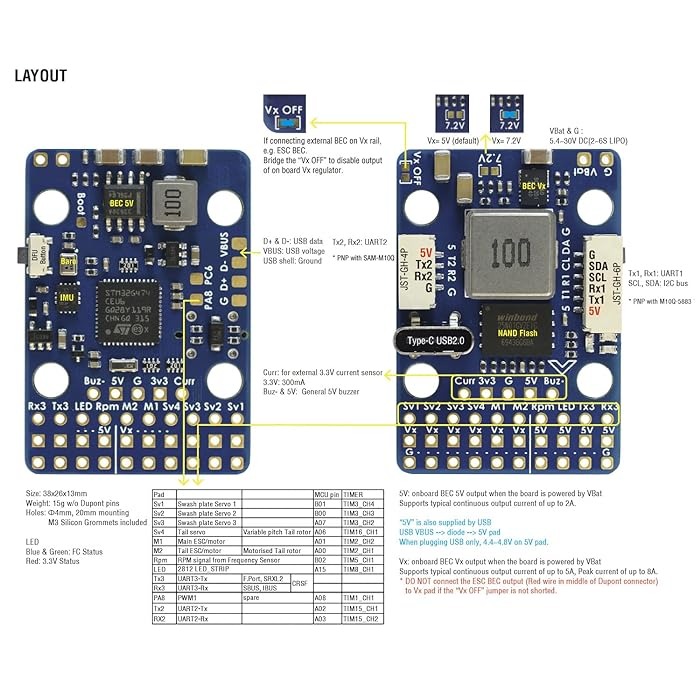
- 8x PWM (4x Servos, 2x Motors, RPM, LED)
- 2x ADC (VBAT, Current)
- USB Type-C(USB2.0)
Electrical characteristics
- Input voltage range: 5.4V~30V (2~6S LiPo)
- No current sensor integrated, support external 3.3V based current sensor.
- Battery Voltage divider 1K:10K (Scale 110)
- BEC 5V 2A for FC and peripherals
- BEC Vx 5A cont. 8A Peak for servos (5V, 7.2V option)
- 3.3V 300mA
Firmware/config
- Rotorflight / MATEKG474HELI
- Rotorflight configurator 2.x https://github.com/rotorflight/rotorflight-configurator/releases
- Rotorflight Wiki https://github.com/rotorflight/rotorflight/wiki
- Latest info: https://www.mateksys.com/?portfolio=g474-heli#tab-id-5
Tips
- If GPS, Receiver or other peripherals are connected to UART2(Tx2,Rx2) and these peripherals are powered ON while connecting USB. STM32G474 will not go into DFU mode. It is related to DFU protocol used in the STM32G474 bootloader. Pls unplug peripherals from UART2 before you try flashing the FC.
- There is no UART4 breakout on this board.
- If using Frsky SBUS+SmartPort receivers. you may remap one of PWM pins to softserial_tx for SmartPort, e.g. LED pin, resource serial_tx 11 A15 , feature softserial .
- Due to leakage voltage on MCU I/O, there is floating current readout when no external current sensor connected. If you don’t use external current sensor. set current_meter = NONE .
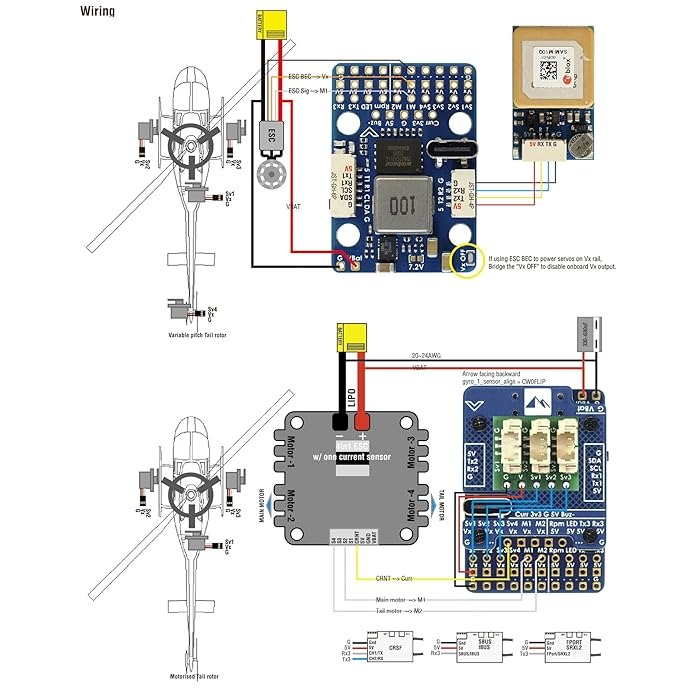
- If the FC is mounted with arrow facing backward. set gyro_1_sensor_align = CW0FLIP
- Blheli bi-direction Dshot ESC, enabled RPM filter: feature rpm_filter
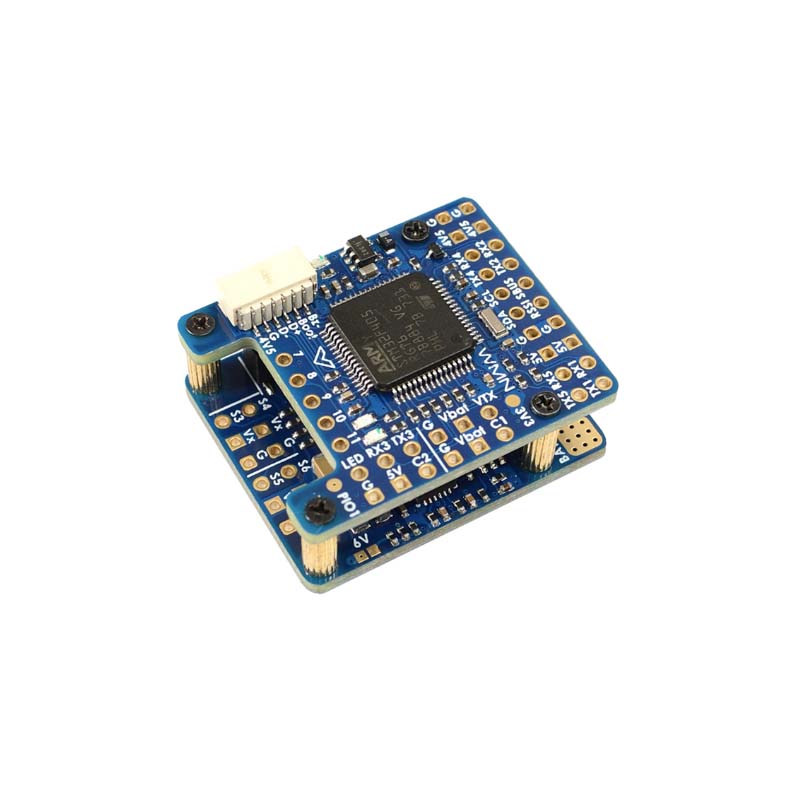
Physical
- Mounting: 20 x 20mm, Φ4mm with Grommets Φ3mm
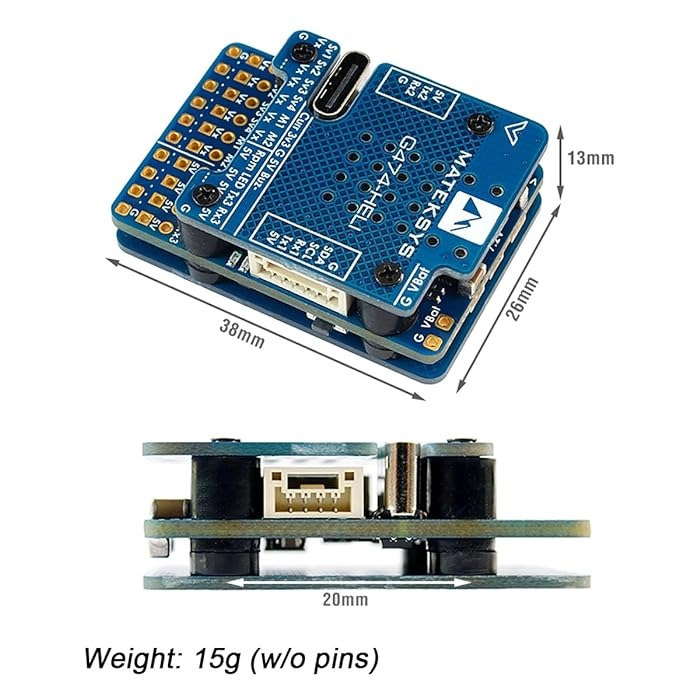
- Dimensions: 38 x 26 x 13 mm
- Weight: 15g (w/o pins)
- 3D step file for designing your own.
- STL for shell shown below: G474-HELI_shell
Including
-
- 1x G474-HELI
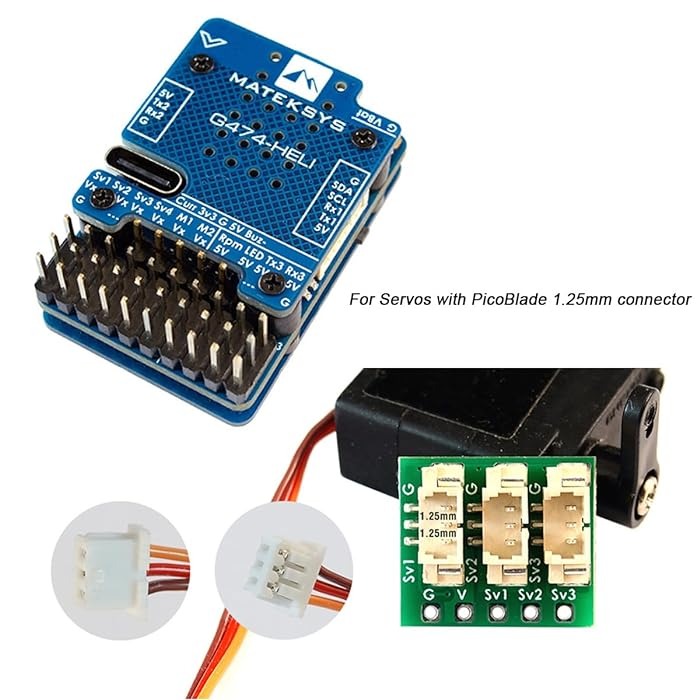
- 1x PicoBlade 1.25mm Servo adapter (M2/S2 servos)
- 1x 20cm JST-GH-4P to JST-GH-4P cable
- 1x 20cm JST-GH-6P to JST-GH-6P cable
- Dupont 2.54 pins (Board is shipped unsoldered)
Additional information
| Brand |
|---|
1 review for Mateksys RC Helicopter Flybarless Controller G474-HELI
Only logged in customers who have purchased this product may leave a review.
Related products
-

HappyModel CruxF405HD AIO Flight Controller 20A ESC with ExpressLRS
$119.99In stockAdd to cart -
Tinyhawk III Spare Parts – AIO Flight Controller and VTX
(3) $139.99In stockAdd to cart -
Sale!
Mateksys F405-WING-V2 Flight Controller
Original price was: $109.99.$89.99Current price is: $89.99.In stockAdd to cart -
Mateksys H743-WING V3 Flight Controller
(3) $219.99Out of stockRead more -
Sale!
Foxeer H7 Mini MPU6000 FC 8S Dual BEC Barometer X8
Original price was: $194.99.$159.99Current price is: $159.99.In stockAdd to cart -
Mateksys F405-WMN Flight Controller
(3) $114.99In stockAdd to cart




Explore more from Mateksys
-
Mateksys 2812 8-LED Board Slim (Qty 2)
$8.99In stockAdd to cart -
Mateksys Servo PDB w/ 12A BEC 9-55V to 5/6/8V
$39.99In stockAdd to cart -
Mateksys Flight Controller H743-SLIM V3
$174.99In stockAdd to cart -
Mateksys BEC PRO 12S to 5/8/12V-5A
(1) $34.99In stockAdd to cart -
Mateksys Power Module 12S w/ 3xBEC
$92.99In stockAdd to cart -
Mateksys ExpressLRS 2.4G True Diversity Receiver
$48.99In stockAdd to cart






Other Electronics you might like
-
Radiomaster ERS-GPS for ExpressLRS PWM Receivers
(1) $64.99In stockAdd to cart -
TBS Low-Profile 90d USB A to USB C Cable (50cm)
$14.99In stockAdd to cart -
HappyModel X12 ELRS Pro v1.1 AIO 5-IN-1 Flight Controller
$139.99Out of stockRead more -
EMAX Tinyhawk III Plus Spare Part C – AIO Flight Controller ESC ELRS
(2) $119.99In stockSelect options This product has multiple variants. The options may be chosen on the product page -
AMASS XT60 Female to AMASS T-Plug Deans Male Charge Adaptor
(5) $3.99In stockAdd to cart -
Gold Plated 2.54mm Dupont Crimp Female Terminals 20 Pieces
(6) $1.49In stockAdd to cart








Other Flight Controllers you might like
-
BetaFPV Air Brushless Flight Controller G4 5IN1 V1.0
$89.99Out of stockRead more -
HappyModel Super F405HD AIO Flight Controller 20A ESC with ExpressLRS
$119.99Out of stockRead more -
Flywoo GOKU F722 PRO MINI V2 20X20 Flight Controller (ICM42688)
$89.99Out of stockRead more -
Mateksys RC Helicopter Flybarless Controller G474-HELI
(1) $94.99In stockAdd to cart -
Mateksys F405-WMN Flight Controller
(3) $114.99In stockAdd to cart -
RadioMaster Helicopter Flybarless Flight Controller
(4) $159.99In stockAdd to cart





Graham (verified owner) –