")




F3 vs F4 vs F7 Flight Controllers – What’s the difference?
While shopping for a new Flight Controller, it’s common to see the Processor listed in the title of the FC. You’ll most often see F4 and F7, which equates to the processing power and capability of the flight controller.
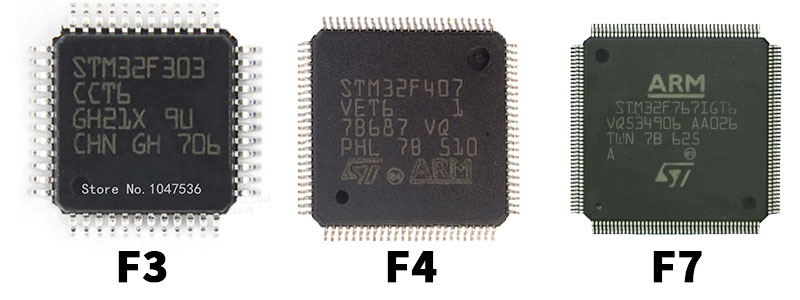
F3, F4, and F7 are types of STM32 Processors, which are 32-bit based Microcontrollers. Without going into the technical details of it all, they’re the component which does all the calculations on your FC to run the Drone’s Firmware (usually Betaflight).
F7 is the newest iteration of the STM32 Processors commonly used in Flight Controllers, followed by the F4 and F3 respectively. The F- number doesn’t have any indication to the performance, but is an interation of the F-series of processors.
Which Processor has the best performance for Betaflight?
Currently, F7 processors are the highest performing processor commonly available, however the H7, a newer version of the F7, is in the works and upcoming in the future. For the meantime, F7 processors can comfortably run all the functions and features available in Betaflight. Below is a table of the maximum performance of each processor.
| Name | Max Clock Speed | Launched | Flash Memory |
| STM32 F3 | 72 MHz | 2012 | 256kB |
| STM32 F4 | 168MHz | 2011 | 1MB |
| STM32 F7 | 216MHz | 2014 | 1MB |
| STM32 H7 | 480MHz | 2017 | 128kB* |
Which Flight Controller should I choose?
When considering a F4 or F7, you must consider how many UARTs you need, the features you’re using, and how much you want to futureproof your drone build.
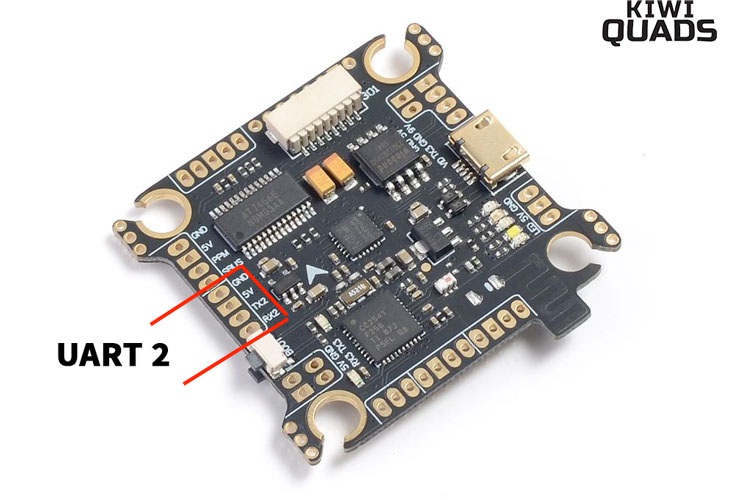
A UART (Universal Asynchronous Receiver/Transmitter) is essentially a port, or an extension to your flight controller which allows for external modules such as a Serial Receiver or GPS unit to extend it’s features. The STM32 F7 processor has the most UARTs built into processor which means the flight controller is typically more capable and will have more usable UART soldering points.
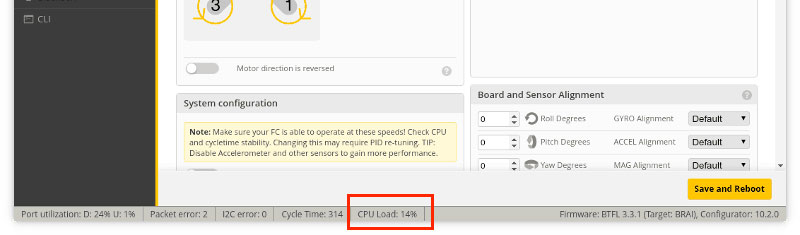
The processing speed affects how many features you can run synchronously. Betaflight has a CPU usage indicator at the bottom of the configurator UI. It is important to keep this indicator below 30% when the FC is idle. To lower the usage, you may need to disable some features and turn off some gyro filters. If the CPU idle usage is too high, the CPU may overheat and cause issues while flying.
If you plan to use lots of gyro filtering or a GPS module on your quad, we always recommend using a F7 flight controller. The extra processing power will ensure stable performance.